DIY Scara Robot Arm Homemade Z Axis Base Machine
DIY Scara Robot Arm Homemade Z Axis Base Machine
The SCARA is a type of industrial robot. The acronym stands for Selective Compliance Assembly Robot Arm[1] or Selective Compliance Articulated Robot Arm.
By virtue of the SCARA’s parallel-axis joint layout, the arm is slightly compliant in the X-Y direction but rigid in the Z direction, hence the term: Selective Compliance. This is advantageous for many types of assembly operations, i.e., inserting a round pin in a round hole without binding.
The second attribute of the SCARA is the jointed two-link arm layout similar to human arms, hence the often-used term, Articulated. This feature allows the arm to extend into confined areas and then retract or “fold up” out of the way. This is advantageous for transferring parts from one cell to another or for loading or unloading process stations that are enclosed.
SCARAs are generally faster than comparable Cartesian robot systems. Their single pedestal mount requires a small footprint and provides an easy, unhindered form of mounting. On the other hand, SCARAs can be more expensive than comparable Cartesian systems and the controlling software requires inverse kinematics for linear interpolated moves. However, this software typically comes with the SCARA and is usually transparent to the end-user.
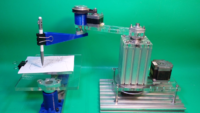
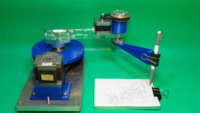
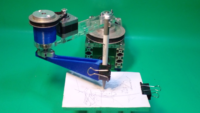
The The SCARA robot has 4 degrees of freedom and it’s driven by 4 NEMA 17 stepper motors. Additionally, it has a small servo motor for controlling the end effector or the robot gripper in this case. The brain of this SCARA robot is an Arduino UNO or Mega board which is paired with a CNC shield and four A4988 stepper drivers for controlling the motors.
More Vacuum Cleaner Machine Homemade here
If you have problems downloading you can try here